
Simulador De Voo Dtxmx 8Ch Rc, Suporte Real G7 Phoenix 5.0, Controle Remoto Xtr, Helicóptero De Asa Fixa (Model2)
- 95 comentários
- 56 Vendido
USD $53.76IVA Incluído
apenas para Dropshipping e Atacado
Opinião dos consumidores
*Nota: Algumas revisões foram processadas pelo Google Translate!Material: plástico
Recomendar idade: 12+y
Fotografia aérea: não
Aviso: Não é necessária bateria
Modo do controlador: modo2
Garantia de 1 ano
Canais de controle: 8 canais
Número do modelo: 16in1 8ch
Código de barras: não
Cor: cinza
Tipo: Simuladores
Dtxmx 8ch rc suporte simulador de vôo real rf7 g7 phoenix 5.0 xtr helicóptero controle remoto drone de asa fixa (mode2)
Observação:Só vendemos o modelo 2.Se você precisar do modelo 1, entre em contato conosco.
Características:
1. instalação de uma chave g7.0, equipada com rf7 g7/g6.5 real (o único número de série). Suporte para atualização on-line.
2. phoenix 5.0 suporta atualização on-line.
3. idioma:. Chinês e inglês
4. ambiente de instalação:. (32 bits, 64bits) xp, windows 7, windows 8, windows10, vista
Suporte de alça simulador:
Novo g7.0, g6.5, ~ g4
Nova versão phoenix 5.0 ~ ~ 2.5Xtr,
Observação para instalação:
1. em primeiro lugar, tente encontrar o ícone "autorun" em cd, este é o guia de instalação rápida.
2. antes de executar qualquer programa, por favor, instale o "directx9.0" no cd.
3. execute o console de simulador "número" como administrador em cd e mude para programas diferentes com mais facilidade e conveniência.
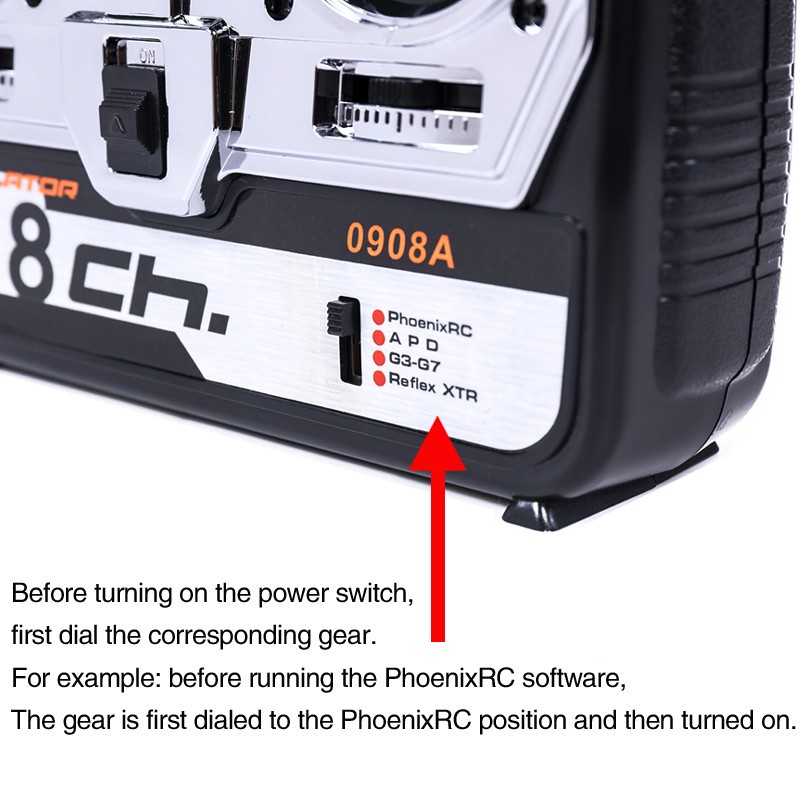
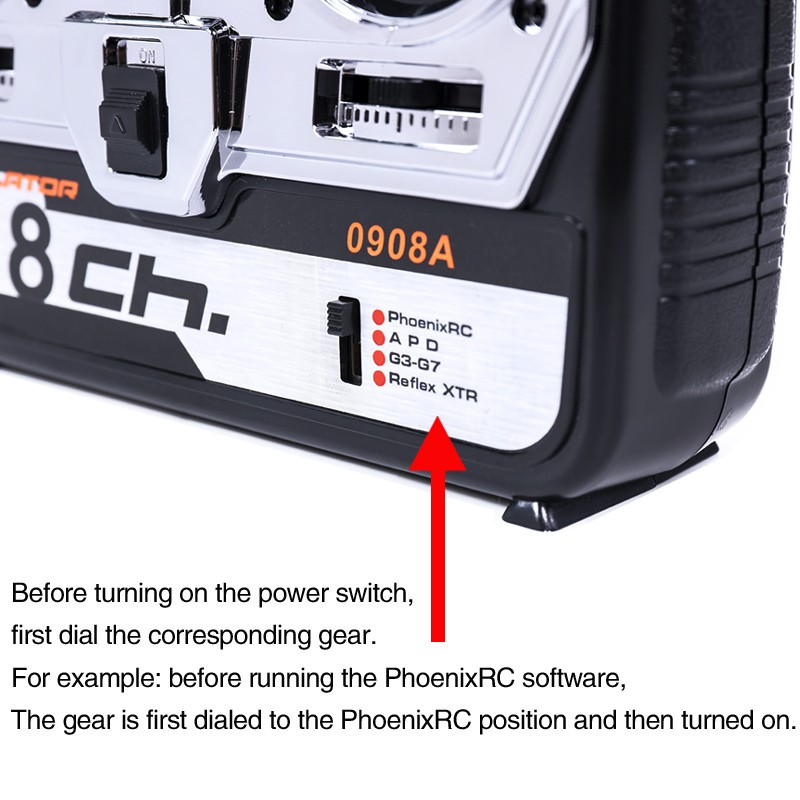
Ou mude o interruptor no canto inferior direito da alça do emulador usb-quatro engrenagens deslizantes para você escolher.
4. após executar o switcher simulador para selecionar o nome do software, execute g7.0 ou phoenix 5.0Xtr,
1. número
2. número
3. número
4. número
5. número
6. número
7. número
8. número
9.Número
10.Número
Descrição:
1. para o xtr como exemplo: passos não podem estar errados! Puxe o interruptor analógico para o departamento de logotipo xtr, irá simular o plugue de fiapos usb com controle remoto em seu computador e, em seguida, abra o interruptor de alimentação de controle remoto simulado, desta vez, a lanterna de energia de controle remoto continuou piscando (se não estiver ligada, a interface do computador, não, precisa de outra alterar a interface do computador, A sequência de operação acima ainda precisa operar uma vez).
2. um bom software xtr instalado, abra o software, aponte a parte superior da barra de diretório "controle remoto" e, em seguida, aponte o pop-up "distribuição de canal", o canal é definido acima do diagrama, o sinal não pode ser definido se não houver alocação de canal, Em seguida, substitua a interface usb do computador, o que mais está tentando.
3. configurações de canal --- selecione um modelo de helicóptero (a máquina de óleo também está ok) e, em seguida, irá simular todo o centro de controle remoto de ajuste fino, acelerará o puxador mais significativo várias vezes sob o mastro (não tal ação leva a "calibrar a posição neutra" quando o item do acelerador não pode ser neutro, E, portanto, não pode ser uma decolagem normal) e, em seguida, colocada no meio da haste do acelerador, após a coluna do catálogo de software do computador "controle remoto" abaixo para descobrir a calibração de "posição neutra de calibração", calibração, simulação inicial após o ponto de conclusão --- verifique para ver quais canais não (Ao redor da cauda da bainha, sintonize em uma máquina real, como a mesma direção que o controle) --- se assim for, qual canal não, em seguida, as configurações do canal de retorno que irão controlar o lado direito do canal "para"-"(ou vice-versa), Como indicado na figura à direita para calibrar novamente o ícone --- --- as configurações do canal estão corretas, você pode começar a tocar um!
4. como o helicóptero decolou muito pesado, aponte "modelo" e, em seguida, aponte "parâmetros físicos de mudança," o peso do helicóptero em 1 kg menos, seria mais próximo à sensibilidade real da máquina. Aterrado e também pode modificar o simulador nos parâmetros relevantes, como ajustar a sensibilidade do giroscópio e assim por diante, para obter o melhor vôo de helicóptero. Deve ser lembrado que a simulação é difícil, e a mesma máquina real, e gostaria de pilotar um helicóptero para pairar ou voar, etc. também é uma necessidade de praticar lentamente, ou não toque na prática de.
Este é um simulador de vôo de controle remoto conectado a um computador
Não rádio
Não suporta aeronaves de controle remoto físico
Alimentado por usb do computador, sem necessidade de bateria
Observação:
Modelo 1 -- acelerador na direita
Modelo 2 -- haste do acelerador à esquerda
Lista de embalagem:
1x 8ch xtr simulador de vôo
1x software simulador dvd
Antes de ligar o interruptor liga/desliga, primeiro disque a engrenagem correspondente.
Por exemplo: antes de operar o software phoenixrc, o equipamento é acionado pela primeira vez na posição phoenixrc e, em seguida, ligue.
.
.